平成29年度課題
テーマB1: 相撲ロボット
担当(実習日):山崎(火曜日),倉本(木曜日)
(1)概要
センシングによって動作する自立型相撲ロボットを製作する.相手ロボットを土俵から押出したり,ひっくり返したりして,発光ダイオードなどで勝利パフォーマンスを行う.
(a)構成
・感知センサ(光センサ,接触センサ,など)
・勝利パフォーマンス用素子(発光ダイオードなど)
・マイコン,情報処理・モータ駆動指令回路,制御プログラム,モータ,ボディ,車輪など
・相撲ロボット(図1参照)のサイズは200 mm×200 mm以内,高さは無制限
(b)競技方法
・両者は200 mm離れた場所から,光センサなどの信号を受けて動作を開始
・勝敗と,勝利(敗戦)パフォーマンスを総合して優劣を競う
(c)購入部分
・マイコン:基幹部品(教員用意)
・感知センサ,発光ダイオード,モータなど:在庫品または各班で購入
・土俵(φ1540 mm,鋼板):教員用意
(d)製作部分
・相撲ロボットのボディや車輪などは,金属または樹脂製とし,フライス盤や旋盤で加工製作する
・情報処理・モータ駆動指令回路(はんだ付作業)
・センサ認識,モータ駆動のためのプログラム
(2)実習の内容
・勝利のために強靭なボディや動作,機構などを考案し,図面の作成,加工製作する
・情報処理・モータ駆動制御回路を製作し,センサを認識してモータ駆動を行うためにプログラミングする
・オリジナルでインパクトのある勝利(敗戦)パフォーマンスを行う
(3)参考資料:たとえば
・ぼくらのマイコン・ロボット工作,横井浩史,松下光一郎共著,CQ出版社
・必勝!ラジコン型相撲ロボット製作テクニック,吉岡謙著,オーム社
・全日本ロボット相撲大会HP) http://www.fsi.co.jp/sumo/tournament/index.html
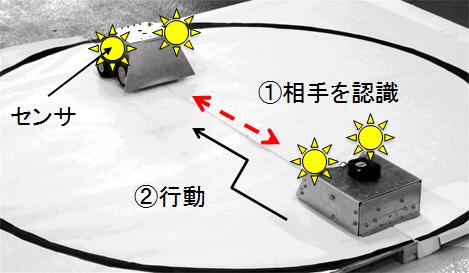
図1 相撲ロボットの動作イメージ
テーマB2: 階段移動谷越えロボット
担当(実習日):松田(火曜日),道辻(木曜日)
(1)概要
キャタピラや脚機構などを用いて,異なる段差の階段をのぼりきり,そのあとに待ち受ける谷を越えるロボット製作に挑戦!
(a)構成
・モータ,センサおよびマイコンを搭載したロボット
・走行コース(教員準備,図1を参照)
(b)競技方法
・走行コースの各セクションを通過できるかどうか.また,全セクションを通過できる場合は走破までの時間を争う
・階段をのぼりきるまで(谷の手前まで)のロボットのサイズは150㎜×150㎜×150 ㎜におさまっていなければならない
・階段の段の高さは30 ㎜,40 ㎜,50 ㎜の3段で構成されている
・谷の幅は150㎜である.谷を渡る前に,サイズを大きくしたり,谷を越えるための機構を展開したりするなど,特別な工夫が必要である
(c)購入部分
・マイコン,モータ+減速機構(2軸),電池ボックス,赤外線センサからなるセット(教員用意)
・階段走行機構部材,谷を越える機構部材
・追加センサ,マイコン,モータ,減速機等
(d)製作部分
・ロボットの機構,センサ取り付けの治具をフライス盤や旋盤で加工する
・階段を上る際のプログラム,谷を渡る際のプログラム
(2)実習の内容
・階段の構造を十分考慮し,階段走行機構や部品の大きさを複数案決定する
・谷越えのアイデアは様々なものが考えられる.各班で慎重に協議し,個性的なロボットを考えて欲しい
(3)参考資料
・住野和男,林俊一共著:絵ときでわかる機構学,(2006)オーム社
・小峰龍男著:機構学の「しくみ」と「基本」,(2009)技術評論社

図1 走行コース(階段と谷越え)
テーマB3: 遠投マシン
担当(実習日):松村(火曜日),尾関(木曜日)
(1)概要
与えられた1個のモータと乾電池2個を使って,テニスボールの飛距離を競う.
(a)構成
・モータ:マブチモータRE-280RA
・単3乾電池(2個)
・動力伝達機構
・ボールの遠投機構
・射出機構
(b)競技方法
・バネ,ゴム,質量,圧縮空気等を用いた遠投機構により,テニスボールを遠くに飛ばす(ボールの飛距離を競う)
・モータの動力はボールを飛ばすためのエネルギーを蓄積させるために使用する.ただし,初期条件はゼロとする(バネ,ゴムは無負荷,質量の位置は地面上)
・ボタン等のワンアクションにより,3分以内でボールの投射までを自動で行う
(c)購入部分
・モータ(マブチモータRE-280RA),単3乾電池(2個):基幹部品(教員用意)
・動力伝達機構部材:在庫品ほか各班購入
・遠投機構部材:在庫品ほか各班購入
(d)製作部分
・ボールの遠投機構や動力伝達機構を旋盤やフライス盤等で加工製作する
(2)実習の内容
・物体の放物運動を理解し,テニスボールの空気抵抗を考慮した投射角度について検討する
・バネ,ゴム,質量,圧縮空気等を用いたボールの遠投機構を考案する
・モータの動力を遠投機構に伝達させる動力伝達機構を考案する
・射出するための機構(磁石,機械式,センサー等)を考案する
(3)参考資料: なし

図1 遠投マシン