平成27年度課題
テーマC2: 壁登りロボット
担当(実習日):松田(火曜日),道辻(木曜日)
(1)概要
60度の勾配で途中に障害物のある壁をセンサで感知し登ることのできる壁登りロボットを製作する.
(a)構成
・駆動源:減速機付モータ(最大4chまで)
・動力伝達機構
・斜面で縦・横・斜めへの移動機構
・障害物検出機構
・壁を上る際のプログラム
(b)競技方法
・壁(図1):幅500 mm,長さ1,000 mmの合板に10 mm角の木材を50 mm間隔で配置される壁をセンサで感知しできるだけ早く頂上まで到達することを競う
・スタートから400 mmの中央と,さらに300 mm先の両側に,縦10 mm,高さ100 mm,幅100 mmの障害物が配置されるが,障害物は避けても乗り越えても構わない
・センサの種類は自由とする
・ロボットは,縦,横,高さともに最大300 mm以下とする
(c)購入部分
・ビュートローバーCPUボード+I/Oボード(教員用意)
・減速機付きモータ2ch(教員用意)
・赤外線センサ2ch,タッチセンサ1ch(教員用意)
・ロボットの機構部材(常備品の中にあれば購入),センサなど
(d)製作部分
・壁登り機構,動力伝達機構をフライス盤や旋盤で加工製作する
・移動のためのプログララムを作成する
(2)実習の内容
・壁,障害物の構成を十分理解し,機構や部品の大きさを決定する
・障害物をどのように検知し,回避あるいは突破できるかを考える
・モータキットからの動力伝達機構を考案する
(3)参考資料:
たとえば,
・住野和男,林俊一共著:絵ときでわかる機構学,(2006)オーム社
・小峰龍男著:機構学の「しくみ」と「基本」,(2009)技術評論社
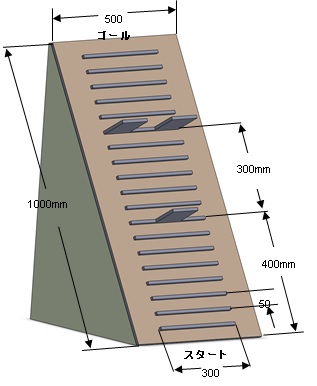
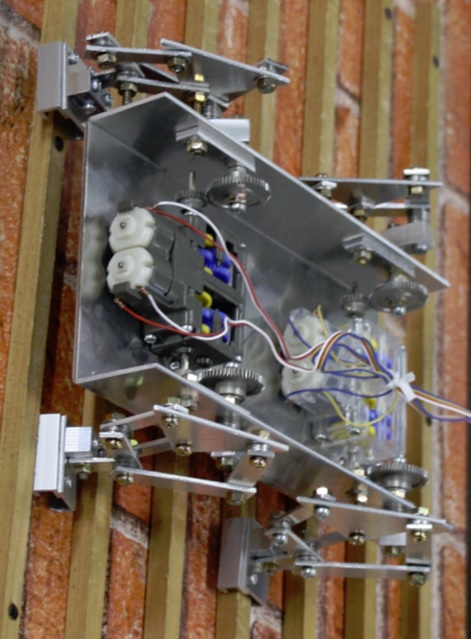
図1 壁(勾配60度) 図2 製作例
テーマC3: 風力発電機
担当(実習日):松村(火曜日),尾関(木曜日)
(1)概要
自転車用の発電機(ハブダイナモ)と風車を組み合わせた風力発電機の製作を行う.
(a)構成
・風車(各班で設計・製作)
・発電機(ハブダイナモ:共通品を使用)
・発電機固定台(各班で設計・製作)
(b)競技方法
・送風機(羽根車直径400 mm,羽根車中心高さ1170 mm)から500 mm離れた位置に風力発電機を設置する.
・静止状態から送風機を「強風」に設定し,その風(風速5 m/s程度)を利用して発電を行い,LED(発光ダイオード)を点灯させる.
(c)購入部分
・風車と発電機固定台の機構部材:在庫品ほか各班で購入
・発電機(ハブダイナモ):各班で共通品として購入
・LED点灯キット:競技用具(教員用意)
・送風機:競技用具(教員用意)
(d)製作部分
・風車及び発電機固定台をフライス盤や旋盤等で加工製作する.
(2)実習の内容
・静止状態からでも発電機を駆動出来るように,始動トルク(コギングトルク)を考慮して,回転する風車を考案する.
・効率良く回転する風車と発電機の組み合わせについて検討する.
(3)参考資料
・牛山泉:風車工学入門,(2002)森北出版
・三野正洋:自転車の発電機でマイクロ風力発電に挑戦,(2003)パワー社
・三野正洋:自転車発電機(ハブダイナモ)による超小型風車の製作,(2011)パワー社

図1 作品例
テーマC4: ピンポンサーブマシン
担当(実習日):山崎(火曜日),倉本(木曜日)
(1)概要
色々な回転がかかったサーブを打てるピンポンサーブマシンの製作に挑戦(図1,図2参照).
(a)構成
・動力伝達機構,トス機構,サーブ機構
・モータ,センサ使用可
(b)競技方法
・ワンアクションで,トスからサーブを行う
・トス機構は必ず付加すること(静止させた球を打つことは出来ない)
・コート内にピンポン玉を入れる
・どのようなサーブを打つことが出来るか(ドライブ,スライス,スピードなど)
・動力源は問わない(位置,ばね,電気エネルギー等)
(c)購入部分
・アクリル板,アルミ板,鉄アングル,塩ビパイプなどの材料
・ばね,ゴム,ギアボックスなど:在庫品・余剰品または購入品
・ピンポン球(直径40 mm),コート(図2参照):教員用意
(d)製作部分
・トス,サーブ機構や動力伝達機構を,旋盤やフライス盤で加工製作する
(2)実習の内容
・ピンポン玉に与える運動と運動量,サーブの軌跡を理解する
・目標を達成するためのトス・サーブ機構を考案する
・在庫品,購入品などのリストアップ
・部品図,組立図の作成,部品の加工,組立て,サーブ試験
(3)参考資料:なし
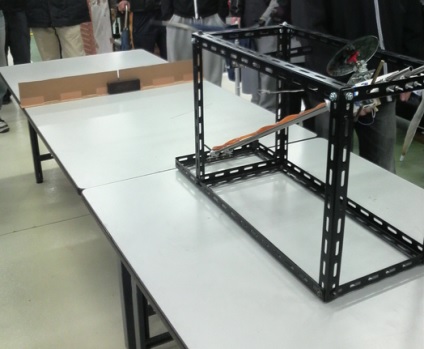
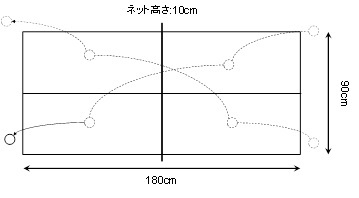
図1 作品例 図2 コート概要